- Eigen >= 3.2
- boost >= 1.54
- QT >= 5.2
- OpenGL Core Profile >= 4.0
- Ouster의 intensity 문제
- src/shaders/draw_points.vert
# 수정 전
in_remission = clamp(in_remission, 0.0, 1.0);
# 수정 후
in_remission = clamp(in_remission / 255.0, 0.0, 1.0);# 의존성
sudo apt install cmake g++ git libeigen3-dev libboost-all-dev qtbase5-dev libglew-dev
cd ~/Desktop
git clone https://github.com/t0mark/LiDAR_Labeling
cd LiDAR_Labeling
# 빌드
cmake -S . -B build
cmake --build buildcd bin
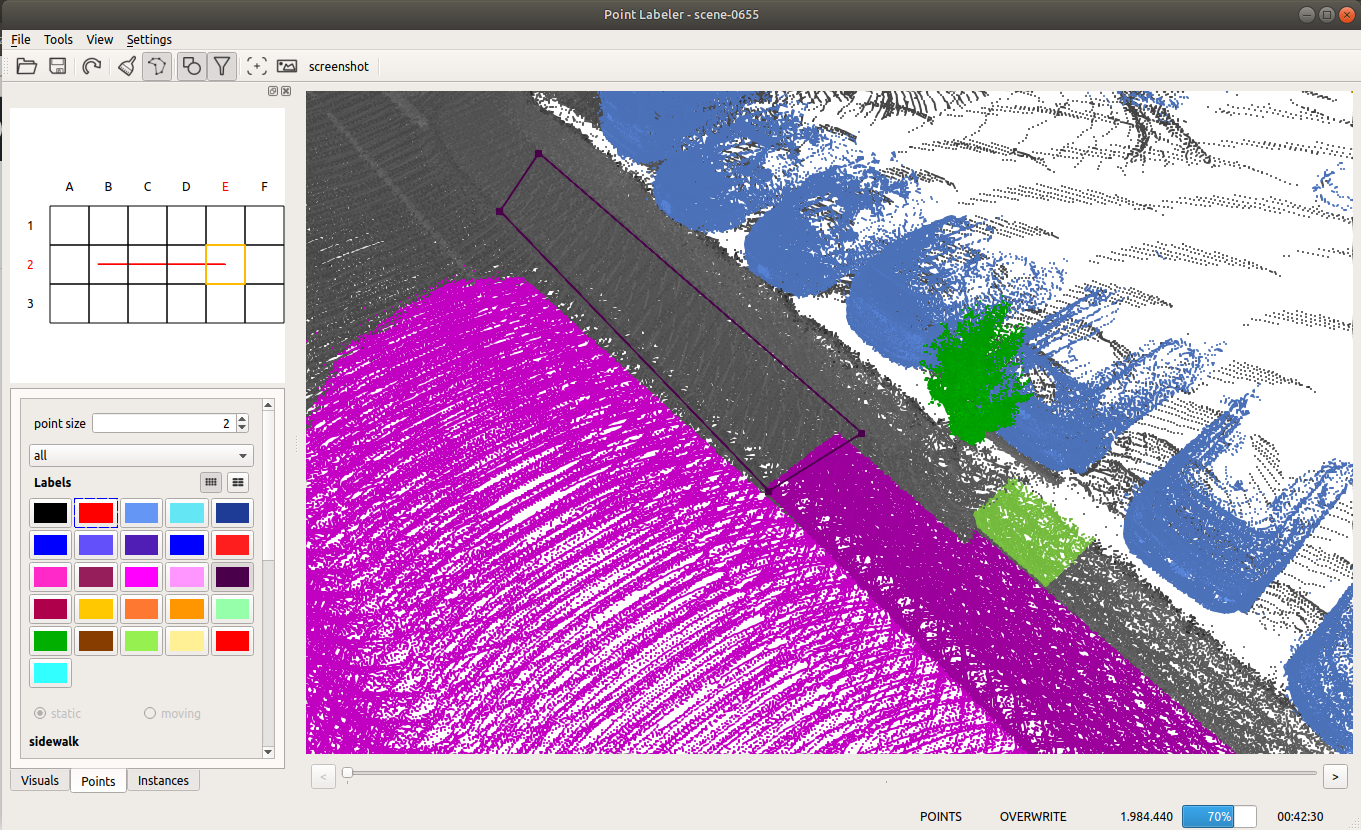
./labeler
# 데이터 디렉토리 선택 (SemanticKITTI 구조)- 폴더 구조 (SemanticKITTi 구조)
point cloud folder ├── velodyne/ -- point cloud (.bin) 파일 ├── labels/ [선택 사항] -- label 파일 ├── image_2/ [선택 사항] -- image (.png)파일 ├── calib.txt -- LiDAR - Camera calibrataion 파일 └── poses.txt -- 각 스캔 당 pose 정보 파일
- 설정 파일 변경 (bin/settings.cfg)
tile size: 50.0
max scans: 100
min range: 0.0
max range: 30.0
gpu memory: 8
add car points: true-
이미지 보기
-
단축키
- calib.txt 파일 (임의 작성, 아래 내용 복/붙)
P0: 1 0 0 0 0 1 0 0 0 0 1 0
P1: 1 0 0 0 0 1 0 0 0 0 1 0
P2: 1 0 0 0 0 1 0 0 0 0 1 0
P3: 1 0 0 0 0 1 0 0 0 0 1 0
Tr: 1 0 0 0 0 1 0 0 0 0 1 0