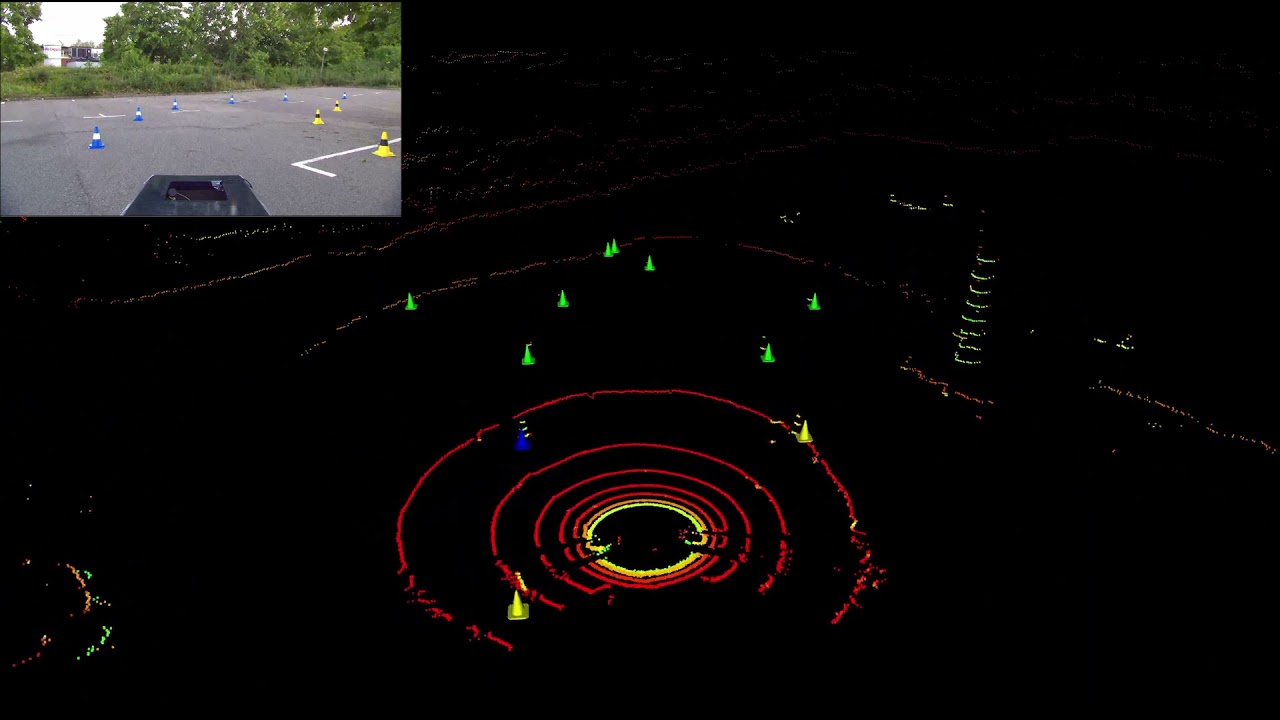
This part of the master thesis project by Gustaf Broström and David Carpenfelt Robust Perception for Formula Student Driverless Racing. Made for the Lund Formula Student 2021 autonomous racing vehicle to accurately detect and classify cones on a racing track.
The code relies heavily on the order of the data read from a 3D lidar to quickly perform ground removal and clustering algorithms.
The code consists of a novel ground removal algorithm described in the paper. A novel clustering method dubbed String Clustering and classification methods to distinguish between blue/yellow and big/small cones.