[윤원근] 프로젝트 소개서 #4
Description
프로젝트 명
- Pixhawk Opensource Drone
- 사용언어 : C++
- Hompage: https://github.com/PX4/Firmware
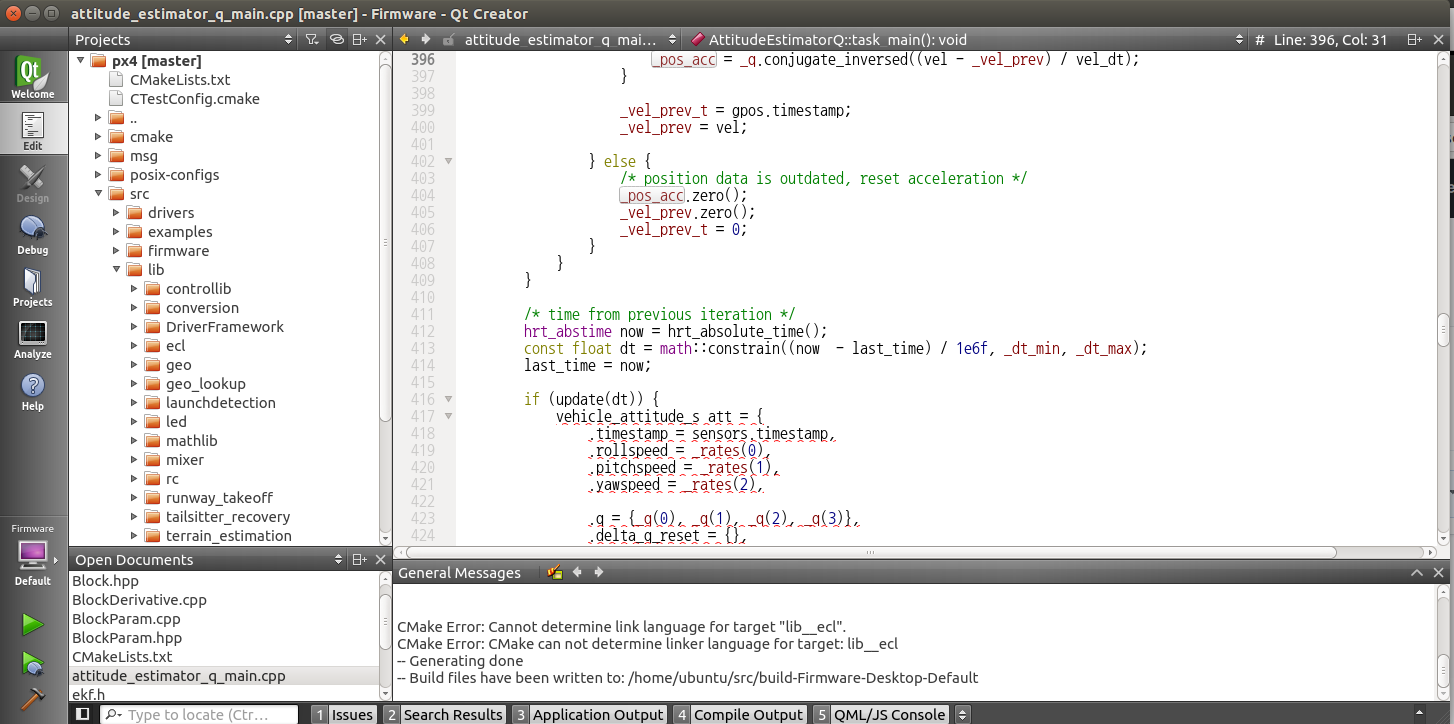
- IDE: Qtcreator
- Example:
.
- Complied Image
Target Algorithm
| Estimator | Feature |
|---|---|
| Attitude Estimator | Quaternion based Attitude Estimator |
| Local Position Estimator | Position, Velocity, Bias Estimator |
| EKF2 | Attitude, Position, Velocity Estimator |
├── BlockLocalPositionEstimator.cpp
├── BlockLocalPositionEstimator.hpp
├── CMakeLists.txt
├── fault_table.py
├── local_position_estimator_main.cpp
├── params.c
└── sensors
├── Flow+Noise+Modelling.pdf
├── baro.cpp
├── flow.cpp
├── gps.cpp
├── land.cpp
├── lidar.cpp
├── mocap.cpp
├── sonar.cpp
└── vision.cpp
Target File: attitude_estimator_q_main.cpp
/****************************************************************************
*
* Copyright (c) 2015 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
/*
* @file attitude_estimator_q_main.cpp
*
* Attitude estimator (quaternion based)
*
* @author Anton Babushkin <anton.babushkin@me.com>
*/
#include <drivers/drv_hrt.h>
#include <lib/geo/geo.h>
#include <mathlib/math/filter/LowPassFilter2p.hpp>
#include <mathlib/mathlib.h>
#include <px4_config.h>
#include <px4_posix.h>
#include <px4_tasks.h>
#include <systemlib/err.h>
#include <systemlib/param/param.h>
#include <systemlib/perf_counter.h>
#include <uORB/topics/att_pos_mocap.h>
#include <uORB/topics/parameter_update.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
#include <uORB/topics/vehicle_global_position.h>
extern "C" __EXPORT int attitude_estimator_q_main(int argc, char *argv[]);
using math::Vector;
using math::Matrix;
using math::Quaternion;
class AttitudeEstimatorQ;
namespace attitude_estimator_q
{
AttitudeEstimatorQ *instance;
} // namespace attitude_estimator_q
class AttitudeEstimatorQ
{
public:
/**
* Constructor
*/
AttitudeEstimatorQ();
/**
* Destructor, also kills task.
*/
~AttitudeEstimatorQ();
/**
* Start task.
*
* @return OK on success.
*/
int start();
static void task_main_trampoline(int argc, char *argv[]);
void task_main();
private:
const float _dt_min = 0.00001f;
const float _dt_max = 0.02f;
bool _task_should_exit = false; /**< if true, task should exit */
int _control_task = -1; /**< task handle for task */
int _params_sub = -1;
int _sensors_sub = -1;
int _global_pos_sub = -1;
int _vision_sub = -1;
int _mocap_sub = -1;
orb_advert_t _att_pub = nullptr;
struct {
param_t w_acc;
param_t w_mag;
param_t w_ext_hdg;
param_t w_gyro_bias;
param_t mag_decl;
param_t mag_decl_auto;
param_t acc_comp;
param_t bias_max;
param_t ext_hdg_mode;
} _params_handles{}; /**< handles for interesting parameters */
float _w_accel = 0.0f;
float _w_mag = 0.0f;
float _w_ext_hdg = 0.0f;
float _w_gyro_bias = 0.0f;
float _mag_decl = 0.0f;
bool _mag_decl_auto = false;
bool _acc_comp = false;
float _bias_max = 0.0f;
int32_t _ext_hdg_mode = 0;
Vector<3> _gyro;
Vector<3> _accel;
Vector<3> _mag;
Vector<3> _vision_hdg;
Vector<3> _mocap_hdg;
Quaternion _q;
Vector<3> _rates;
Vector<3> _gyro_bias;
Vector<3> _vel_prev;
hrt_abstime _vel_prev_t = 0;
Vector<3> _pos_acc;
bool _inited = false;
bool _data_good = false;
bool _ext_hdg_good = false;
void update_parameters(bool force);
int update_subscriptions();
bool init();
bool update(float dt);
// Update magnetic declination (in rads) immediately changing yaw rotation
void update_mag_declination(float new_declination);
};
AttitudeEstimatorQ::AttitudeEstimatorQ()
{
_params_handles.w_acc = param_find("ATT_W_ACC");
_params_handles.w_mag = param_find("ATT_W_MAG");
_params_handles.w_ext_hdg = param_find("ATT_W_EXT_HDG");
_params_handles.w_gyro_bias = param_find("ATT_W_GYRO_BIAS");
_params_handles.mag_decl = param_find("ATT_MAG_DECL");
_params_handles.mag_decl_auto = param_find("ATT_MAG_DECL_A");
_params_handles.acc_comp = param_find("ATT_ACC_COMP");
_params_handles.bias_max = param_find("ATT_BIAS_MAX");
_params_handles.ext_hdg_mode = param_find("ATT_EXT_HDG_M");
_vel_prev.zero();
_pos_acc.zero();
_gyro.zero();
_accel.zero();
_mag.zero();
_vision_hdg.zero();
_mocap_hdg.zero();
_q.zero();
_rates.zero();
_gyro_bias.zero();
_vel_prev.zero();
_pos_acc.zero();
}
/**
* Destructor, also kills task.
*/
AttitudeEstimatorQ::~AttitudeEstimatorQ()
{
if (_control_task != -1) {
/* task wakes up every 100ms or so at the longest */
_task_should_exit = true;
/* wait for a second for the task to quit at our request */
unsigned i = 0;
do {
/* wait 20ms */
usleep(20000);
/* if we have given up, kill it */
if (++i > 50) {
px4_task_delete(_control_task);
break;
}
} while (_control_task != -1);
}
attitude_estimator_q::instance = nullptr;
}
int AttitudeEstimatorQ::start()
{
ASSERT(_control_task == -1);
/* start the task */
_control_task = px4_task_spawn_cmd("attitude_estimator_q",
SCHED_DEFAULT,
SCHED_PRIORITY_ESTIMATOR,
2000,
(px4_main_t)&AttitudeEstimatorQ::task_main_trampoline,
nullptr);
if (_control_task < 0) {
warn("task start failed");
return -errno;
}
return OK;
}
void AttitudeEstimatorQ::task_main_trampoline(int argc, char *argv[])
{
attitude_estimator_q::instance->task_main();
}
void AttitudeEstimatorQ::task_main()
{
#ifdef __PX4_POSIX
perf_counter_t _perf_accel(perf_alloc_once(PC_ELAPSED, "sim_accel_delay"));
perf_counter_t _perf_mpu(perf_alloc_once(PC_ELAPSED, "sim_mpu_delay"));
perf_counter_t _perf_mag(perf_alloc_once(PC_ELAPSED, "sim_mag_delay"));
#endif
_sensors_sub = orb_subscribe(ORB_ID(sensor_combined));
_vision_sub = orb_subscribe(ORB_ID(vehicle_vision_attitude));
_mocap_sub = orb_subscribe(ORB_ID(att_pos_mocap));
_params_sub = orb_subscribe(ORB_ID(parameter_update));
_global_pos_sub = orb_subscribe(ORB_ID(vehicle_global_position));
update_parameters(true);
if (!strcmp(argv[1], "status")) {
if (attitude_estimator_q::instance) {
warnx("running");
return 0;
} else {
warnx("not running");
return 1;
}
}
warnx("unrecognized command");
return 1;
}
hrt_abstime last_time = 0;
px4_pollfd_struct_t fds[1] = {};
fds[0].fd = _sensors_sub;
fds[0].events = POLLIN;
while (!_task_should_exit) {
int ret = px4_poll(fds, 1, 1000);
if (ret < 0) {
// Poll error, sleep and try again
usleep(10000);
PX4_WARN("POLL ERROR");
continue;
} else if (ret == 0) {
// Poll timeout, do nothing
PX4_WARN("POLL TIMEOUT");
continue;
}
update_parameters(false);
// Update sensors
sensor_combined_s sensors;
if (orb_copy(ORB_ID(sensor_combined), _sensors_sub, &sensors) == PX4_OK) {
// Feed validator with recent sensor data
if (sensors.timestamp > 0) {
_gyro(0) = sensors.gyro_rad[0];
_gyro(1) = sensors.gyro_rad[1];
_gyro(2) = sensors.gyro_rad[2];
}
if (sensors.accelerometer_timestamp_relative != sensor_combined_s::RELATIVE_TIMESTAMP_INVALID) {
_accel(0) = sensors.accelerometer_m_s2[0];
_accel(1) = sensors.accelerometer_m_s2[1];
_accel(2) = sensors.accelerometer_m_s2[2];
if (_accel.length() < 0.01f) {
PX4_ERR("WARNING: degenerate accel!");
continue;
}
}
if (sensors.magnetometer_timestamp_relative != sensor_combined_s::RELATIVE_TIMESTAMP_INVALID) {
_mag(0) = sensors.magnetometer_ga[0];
_mag(1) = sensors.magnetometer_ga[1];
_mag(2) = sensors.magnetometer_ga[2];
if (_mag.length() < 0.01f) {
PX4_ERR("WARNING: degenerate mag!");
continue;
}
}
_data_good = true;
}
// Update vision and motion capture heading
bool vision_updated = false;
orb_check(_vision_sub, &vision_updated);
if (vision_updated) {
vehicle_attitude_s vision;
if (orb_copy(ORB_ID(vehicle_vision_attitude), _vision_sub, &vision) == PX4_OK) {
math::Quaternion q(vision.q);
math::Matrix<3, 3> Rvis = q.to_dcm();
math::Vector<3> v(1.0f, 0.0f, 0.4f);
// Rvis is Rwr (robot respect to world) while v is respect to world.
// Hence Rvis must be transposed having (Rwr)' * Vw
// Rrw * Vw = vn. This way we have consistency
_vision_hdg = Rvis.transposed() * v;
// vision external heading usage (ATT_EXT_HDG_M 1)
if (_ext_hdg_mode == 1) {
// Check for timeouts on data
_ext_hdg_good = vision.timestamp > 0 && (hrt_elapsed_time(&vision.timestamp) < 500000);
}
}
}
bool
if (!strcmp(argv[1], "status")) {
if (attitude_estimator_q::instance) {
warnx("running");
return 0;
} else {
warnx("not running");
return 1;
}
}
warnx("unrecognized command");
return 1;
}
mocap_updated = false;
orb_check(_mocap_sub, &mocap_updated);
if (mocap_updated) {
att_pos_mocap_s mocap;
if (orb_copy(ORB_ID(att_pos_mocap), _mocap_sub, &mocap) == PX4_OK) {
math::Quaternion q(mocap.q);
math::Matrix<3, 3> Rmoc = q.to_dcm();
math::Vector<3> v(1.0f, 0.0f, 0.4f);
// Rmoc is Rwr (robot respect to world) while v is respect to world.
// Hence Rmoc must be transposed having (Rwr)' * Vw
// Rrw * Vw = vn. This way we have consistency
_mocap_hdg = Rmoc.transposed() * v;
// Motion Capture external heading usage (ATT_EXT_HDG_M 2)
if (_ext_hdg_mode == 2) {
// Check for timeouts on data
_ext_hdg_good = mocap.timestamp > 0 && (hrt_elapsed_time(&mocap.timestamp) < 500000);
}
}
}
bool gpos_updated = false;
orb_check(_global_pos_sub, &gpos_updated);
if (gpos_updated) {
vehicle_global_position_s gpos;
if (orb_copy(ORB_ID(vehicle_global_position), _global_pos_sub, &gpos) == PX4_OK) {
if (_mag_decl_auto && gpos.eph < 20.0f && hrt_elapsed_time(&gpos.timestamp) < 1000000) {
/* set magnetic declination automatically */
update_mag_declination(math::radians(get_mag_declination(gpos.lat, gpos.lon)));
}
if (_acc_comp && gpos.timestamp != 0 && hrt_absolute_time() < gpos.timestamp + 20000 && gpos.eph < 5.0f && _inited) {
/* position data is actual */
Vector<3> vel(gpos.vel_n, gpos.vel_e, gpos.vel_d);
/* velocity updated */
if (_vel_prev_t != 0 && gpos.timestamp != _vel_prev_t) {
float vel_dt = (gpos.timestamp - _vel_prev_t) / 1e6f;
/* calculate acceleration in body frame */
_pos_acc = _q.conjugate_inversed((vel - _vel_prev) / vel_dt);
}
if (!strcmp(argv[1], "status")) {
if (attitude_estimator_q::instance) {
warnx("running");
return 0;
} else {
warnx("not running");
return 1;
}
}
warnx("unrecognized command");
return 1;
}
_vel_prev_t = gpos.timestamp;
_vel_prev = vel;
} else {
/* position data is outdated, reset acceleration */
_pos_acc.zero();
_vel_prev.zero();
_vel_prev_t = 0;
}
}
}
/* time from previous iteration */
hrt_abstime now = hrt_absolute_time();
const float dt = math::constrain((now - last_time) / 1e6f, _dt_min, _dt_max);
last_time = now;
if (update(dt)) {
vehicle_attitude_s att = {
.timestamp = sensors.timestamp,
.rollspeed = _rates(0),
.pitchspeed = _rates(1),
.yawspeed = _rates(2),
.q = {_q(0), _q(1), _q(2), _q(3)},
.delta_q_reset = {},
.quat_reset_counter = 0,
};
/* the instance count is not used here */
int att_inst;
orb_publish_auto(ORB_ID(vehicle_attitude), &_att_pub, &att, &att_inst, ORB_PRIO_HIGH);
}
}
#ifdef __PX4_POSIX
perf_end(_perf_accel);
perf_end(_perf_mpu);
perf_end(_perf_mag);
#endif
orb_unsubscribe(_params_sub);
orb_unsubscribe(_sensors_sub);
orb_unsubscribe(_global_pos_sub);
orb_unsubscribe(_vision_sub);
orb_unsubscribe(_mocap_sub);
}
void AttitudeEstimatorQ::update_parameters(bool force)
{
bool updated = force;
if (!updated) {
orb_check(_params_sub, &updated);
}
if (updated) {
parameter_update_s param_update;
orb_copy(ORB_ID(parameter_update), _params_sub, ¶m_update);
param_get(_params_handles.w_acc, &_w_accel);
param_get(_params_handles.w_mag, &_w_mag);
param_get(_params_handles.w_ext_hdg, &_w_ext_hdg);
param_get(_params_handles.w_gyro_bias, &_w_gyro_bias);
float mag_decl_deg = 0.0f;
param_get(_params_handles.mag_decl, &mag_decl_deg);
update_mag_declination(math::radians(mag_decl_deg));
int32_t mag_decl_auto_int;
param_get(_params_handles.mag_decl_auto, &mag_decl_auto_int);
_mag_decl_auto = (mag_decl_auto_int != 0);
int32_t acc_comp_int;
param_get(_params_handles.acc_comp, &acc_comp_int);
_acc_comp = (acc_comp_int != 0);
param_get(_params_handles.bias_max, &_bias_max);
param_get(_params_handles.ext_hdg_mode, &_ext_hdg_mode);
}
}
bool AttitudeEstimatorQ::init()
{
// Rotation matrix can be easily constructed from acceleration and mag field vectors
// 'k' is Earth Z axis (Down) unit vector in body frame
Vector<3> k = -_accel;
k.normalize();
// 'i' is Earth X axis (North) unit vector in body frame, orthogonal with 'k'
Vector<3> i = (_mag - k * (_mag * k));
i.normalize();
// 'j' is Earth Y axis (East) unit vector in body frame, orthogonal with 'k' and 'i'
Vector<3> j = k % i;
// Fill rotation matrix
Matrix<3, 3> R;
R.set_row(0, i);
R.set_row(1, j);
R.set_row(2, k);
// Convert to quaternion
_q.from_dcm(R);
// Compensate for magnetic declination
Quaternion decl_rotation;
decl_rotation.from_yaw(_mag_decl);
_q = decl_rotation * _q;
_q.normalize();
if (PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)) &&
_q.length() > 0.95f && _q.length() < 1.05f) {
_inited = true;
} else {
_inited = false;
}
return _inited;
}
bool AttitudeEstimatorQ::update(float dt)
{
if (!_inited) {
if (!_data_good) {
return false;
}
return init();
}
Quaternion q_last = _q;
// Angular rate of correction
Vector<3> corr;
float spinRate = _gyro.length();
if (_ext_hdg_mode > 0 && _ext_hdg_good) {
if (_ext_hdg_mode == 1) {
// Vision heading correction
// Project heading to global frame and extract XY component
Vector<3> vision_hdg_earth = _q.conjugate(_vision_hdg);
float vision_hdg_err = _wrap_pi(atan2f(vision_hdg_earth(1), vision_hdg_earth(0)));
// Project correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -vision_hdg_err)) * _w_ext_hdg;
}
if (_ext_hdg_mode == 2) {
// Mocap heading correction
// Project heading to global frame and extract XY component
Vector<3> mocap_hdg_earth = _q.conjugate(_mocap_hdg);
float mocap_hdg_err = _wrap_pi(atan2f(mocap_hdg_earth(1), mocap_hdg_earth(0)));
// Project correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -mocap_hdg_err)) * _w_ext_hdg;
}
}
if (_ext_hdg_mode == 0 || !_ext_hdg_good) {
// Magnetometer correction
// Project mag field vector to global frame and extract XY component
Vector<3> mag_earth = _q.conjugate(_mag);
float mag_err = _wrap_pi(atan2f(mag_earth(1), mag_earth(0)) - _mag_decl);
float gainMult = 1.0f;
const float fifty_dps = 0.873f;
if (spinRate > fifty_dps) {
gainMult = math::min(spinRate / fifty_dps, 10.0f);
}
// Project magnetometer correction to body frame
corr += _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, -mag_err)) * _w_mag * gainMult;
}
_q.normalize();
// Accelerometer correction
// Project 'k' unit vector of earth frame to body frame
// Vector<3> k = _q.conjugate_inversed(Vector<3>(0.0f, 0.0f, 1.0f));
// Optimized version with dropped zeros
Vector<3> k(
2.0f * (_q(1) * _q(3) - _q(0) * _q(2)),
2.0f * (_q(2) * _q(3) + _q(0) * _q(1)),
(_q(0) * _q(0) - _q(1) * _q(1) - _q(2) * _q(2) + _q(3) * _q(3))
);
corr += (k % (_accel - _pos_acc).normalized()) * _w_accel;
// Gyro bias estimation
if (spinRate < 0.175f) {
_gyro_bias += corr * (_w_gyro_bias * dt);
for (int i = 0; i < 3; i++) {
_gyro_bias(i) = math::constrain(_gyro_bias(i), -_bias_max, _bias_max);
}
}
_rates = _gyro + _gyro_bias;
// Feed forward gyro
corr += _rates;
// Apply correction to state
_q += _q.derivative(corr) * dt;
// Normalize quaternion
_q.normalize();
if (!(PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)))) {
// Reset quaternion to last good state
_q = q_last;
_rates.zero();
_gyro_bias.zero();
return false;
}
return true;
}
void AttitudeEstimatorQ::update_mag_declination(float new_declination)
{
// Apply initial declination or trivial rotations without changing estimation
if (!_inited || fabsf(new_declination - _mag_decl) < 0.0001f) {
_mag_decl = new_declination;
} else {
// Immediately rotate current estimation to avoid gyro bias growth
Quaternion decl_rotation;
decl_rotation.from_yaw(new_declination - _mag_decl);
_q = decl_rotation * _q;
_mag_decl = new_declination;
}
}
int attitude_estimator_q_main(int argc, char *argv[])
{
if (argc < 2) {
warnx("usage: attitude_estimator_q {start|stop|status}");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (attitude_estimator_q::instance != nullptr) {
warnx("already running");
return 1;
}
attitude_estimator_q::instance = new AttitudeEstimatorQ;
if (attitude_estimator_q::instance == nullptr) {
warnx("alloc failed");
return 1;
}
if (OK != attitude_estimator_q::instance->start()) {
delete attitude_estimator_q::instance;
attitude_estimator_q::instance = nullptr;
warnx("start failed");
return 1;
}
return 0;
}
if (!strcmp(argv[1], "stop")) {
if (attitude_estimator_q::instance == nullptr) {
warnx("not running");
return 1;
}
delete attitude_estimator_q::instance;
attitude_estimator_q::instance = nullptr;
return 0;
}
if (!strcmp(argv[1], "status")) {
if (attitude_estimator_q::instance) {
warnx("running");
return 0;
} else {
warnx("not running");
return 1;
}
}
warnx("unrecognized command");
return 1;
}